Soccerbot
University of Toronto’s first humanoid robotics team
In January 2016, a few undergraduate engineering students at the University of Toronto learned of the RoboCup International Competition, and were inspired by the vision it was founded upon—to have a team of autonomous humanoid robots beat the most recent champions of the World Cup by 2050, in full compliance with FIFA rules. Upon noticing there were no teams representing Canada in the competition, the first plans to start a robot soccer league began. In the summer of 2017, a team of inexperienced—but determined—undergraduate engineering students came together to create the first iteration a robot which could one day achieve RoboCup’s founding goal.
The initial efforts to form new team within UTRA began summer 2016. However, it was not until summer 2017 that we were well-defined and the creation of our robots from scratch began. Following some recruitment around that time, our team had a small number of members split across three subsystems: mechanical, electrical and software. Later that summer, the embedded subsystem (microcontroller software), emerged out of the electrical subsystem, and the control subsystem was formed to focus on bipedal locomotion.
By the end of 2017, our team grew to more than 20 members, all engineering undergraduates at the University of Toronto. Around that time, we were highly focused on achieving the basic requirements to qualify for the 2018 RoboCup competition in Montreal that upcoming summer. After several sleepless February nights, the video below was produced along with a concise paper.
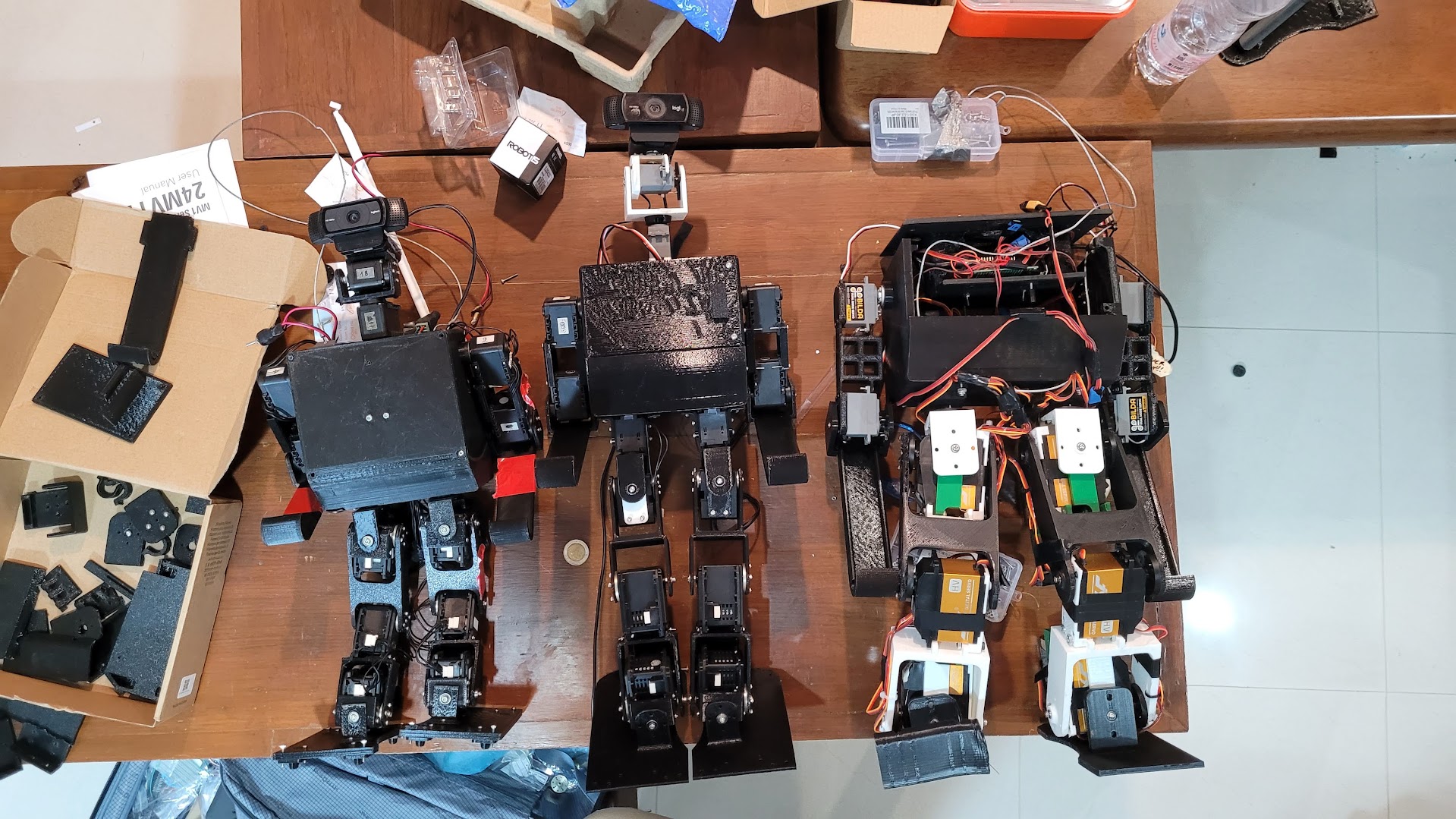
Robots
Third Iteration - Bez 2 (2022)
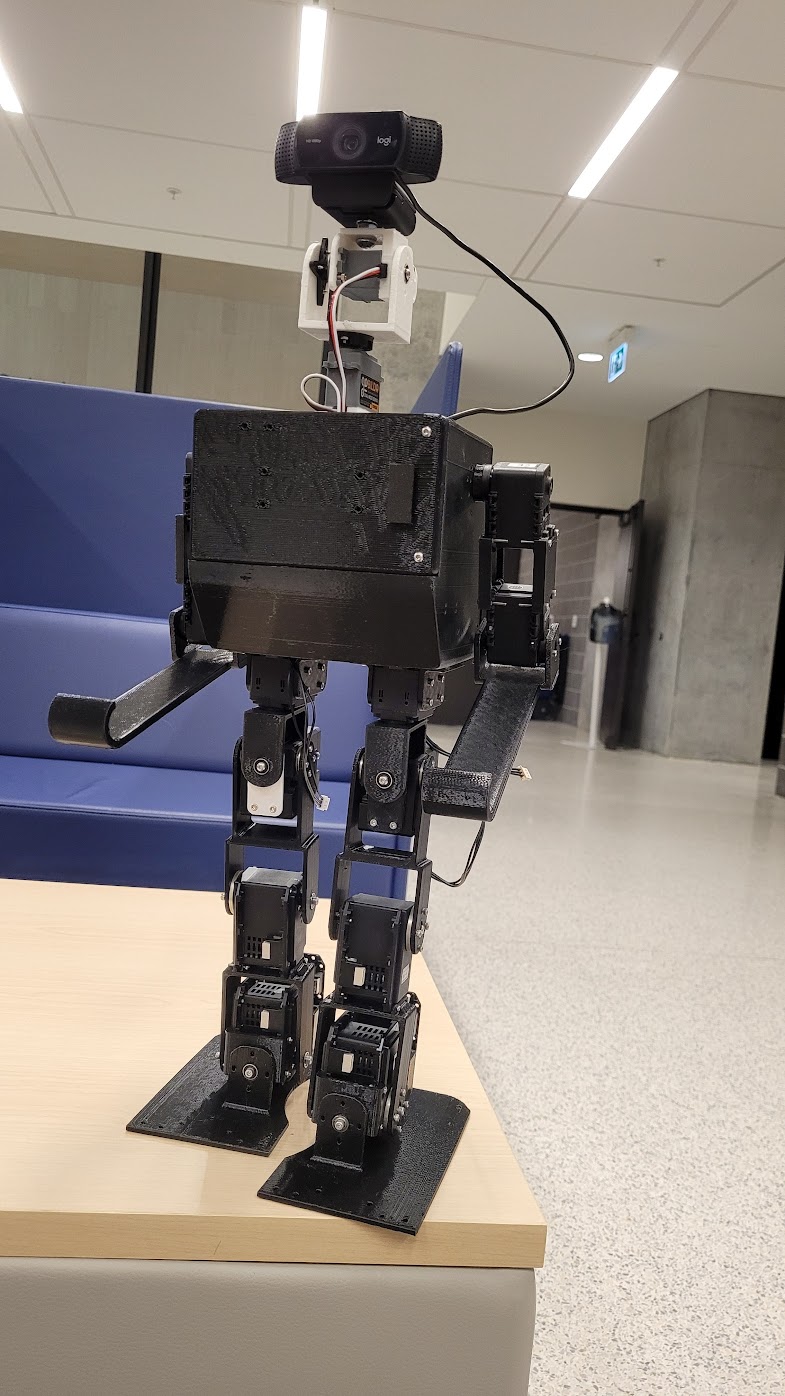
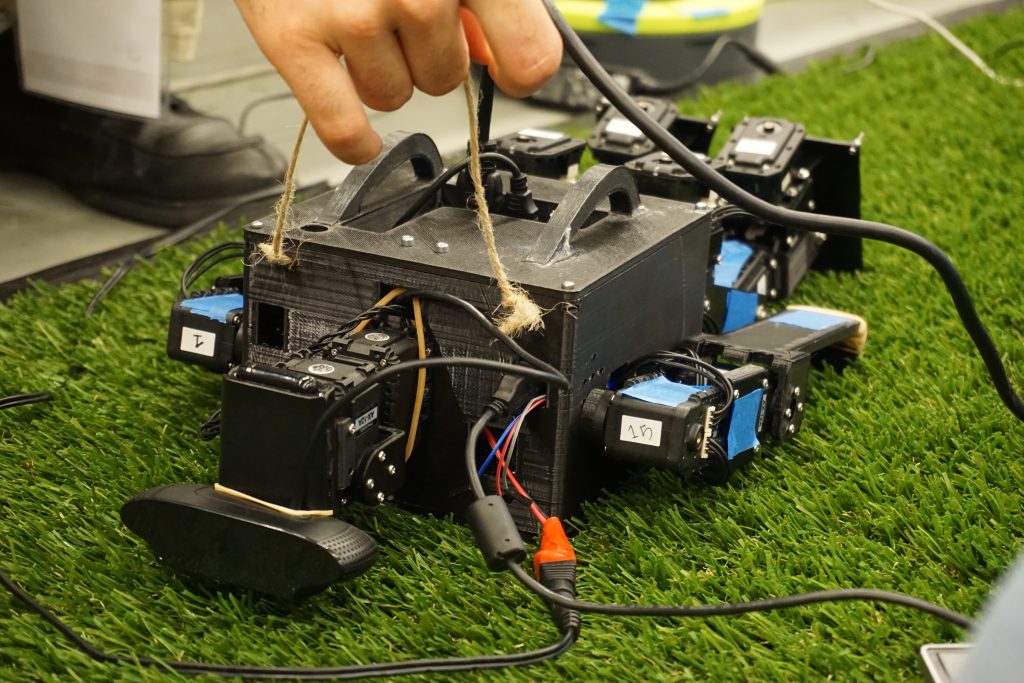
Second Iteration - Bez 1 (2017)

Our second iteration contains of fully 3d printed parts uses a C390 camera for localization and uses dynamixel motors (AX-12 and MX-28) for movement


2020 Qualification video
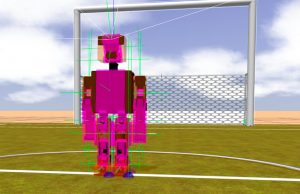
Intelligent robot ball handling in simulation
First Iteration - Bez 0 (2016)

Our first iteration of the robot contacted a pure sheet metal design and had very limitations in terms of robot control and movement completely controlled by Dynamixel AX-12 motors
Qualification Video of first robot (2016)
Past Competitions
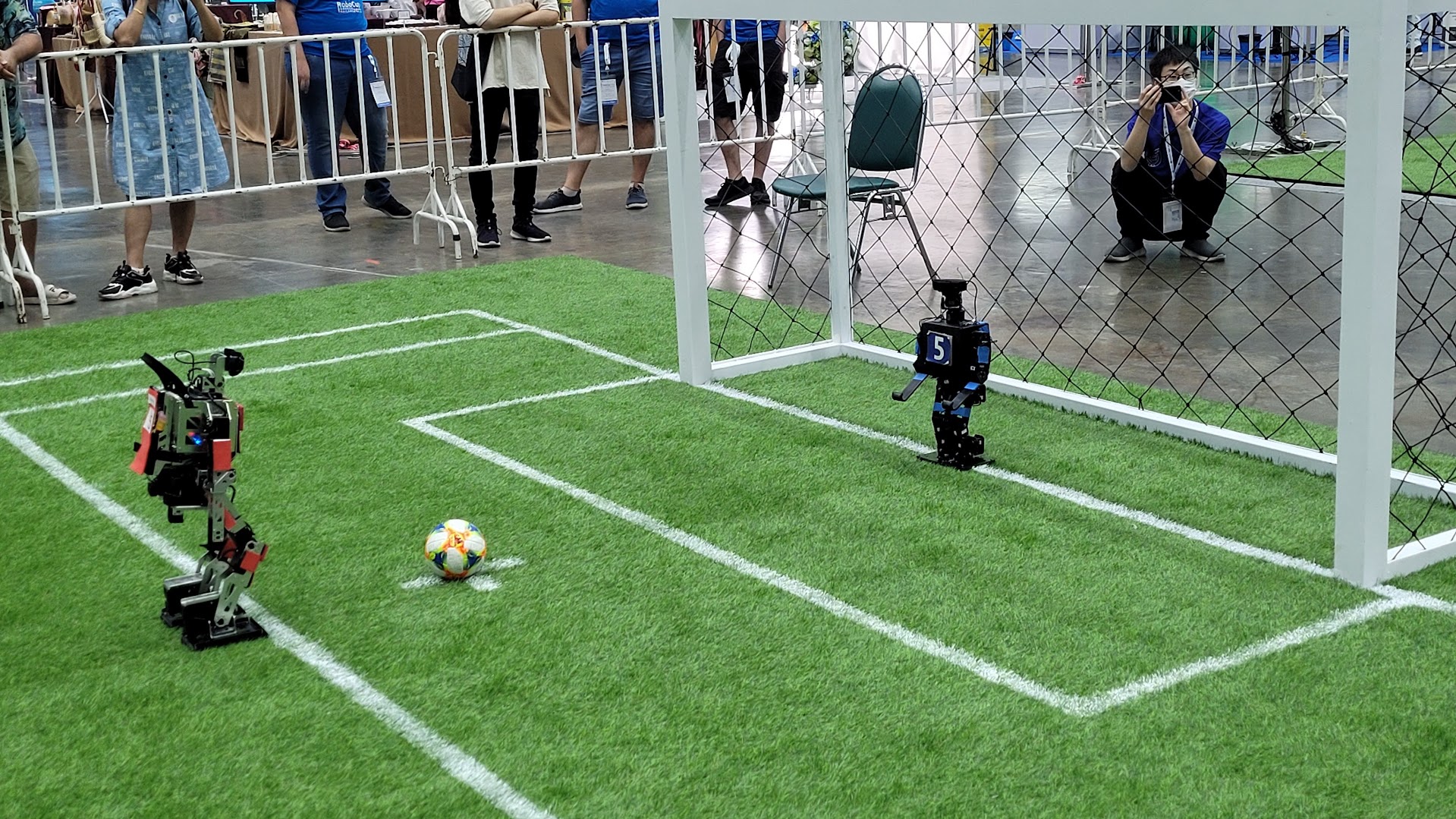
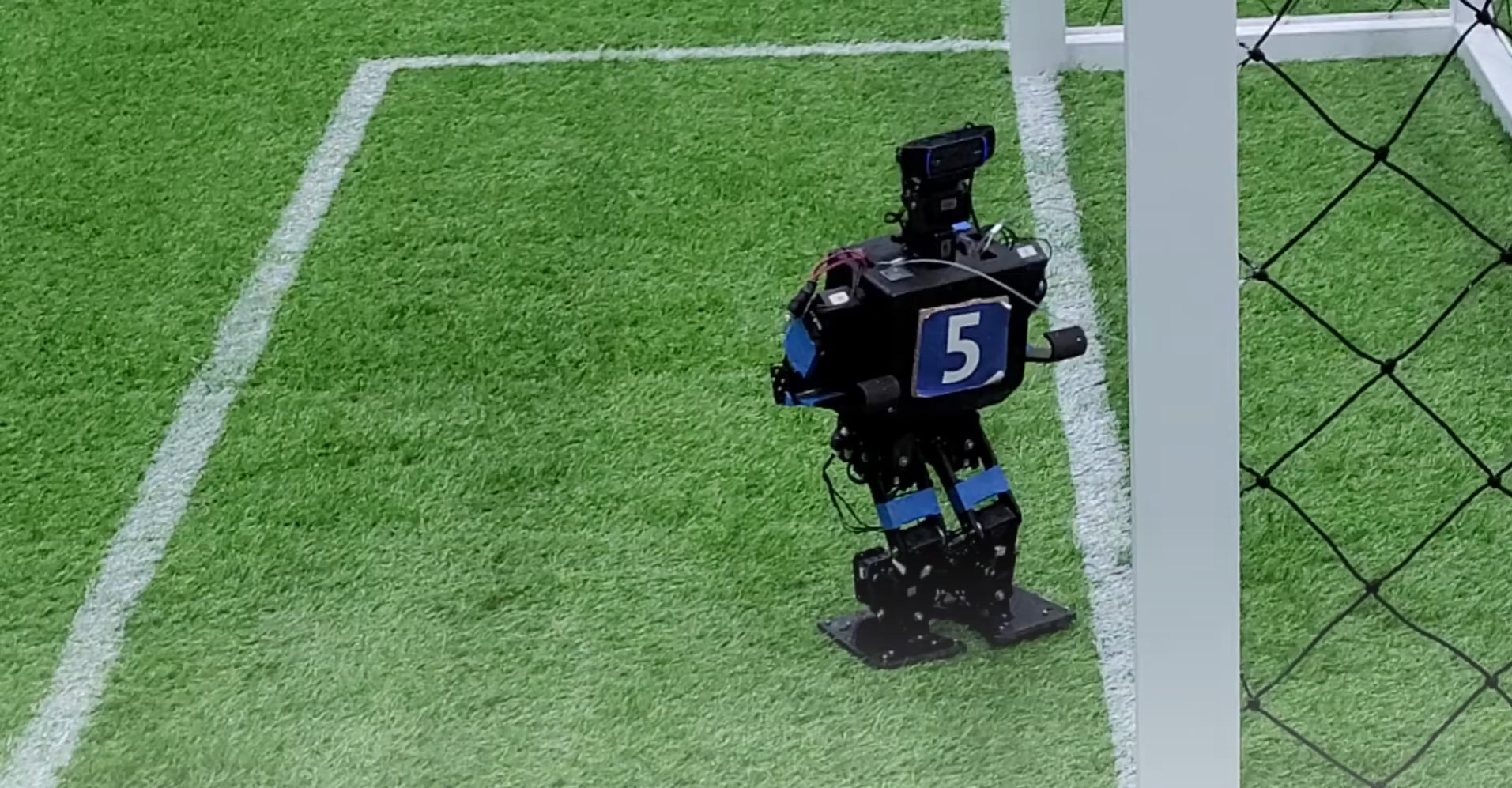
Robocup 2022 - Bangkok, Thailand





Robocup 2018 - Montreal, Canada







Alumni
See current members here (https://github.com/utra-robosoccer/soccerbot/wiki)
Joshua Hillary Salim - Mechanical Lead (2019-2020)
Sabrina Lokman - Project Manager and Mechanical Lead (2016-2019)
Nam Nguyen - Project Manager (2019-2020)
Cameron Alizadeh - Embedded Systems Lead (2019-2020)
Daniel Campoverde - Controls Lead (2018-2020)
Jason Wang - Project Manager and Software Lead (2017-2019)
Shahryar Rajabzadeh - Project Manager (2017-2019)
Tyler Gamvrelis - Embedded Systems Lead (2017–2019)
Nam Nguyen - Mechanical Lead (2017-2019)
Lukas Zhornyak - Controls Lead (2017-2018)
Sponsors