Header for UART event processor, showing the public content. More...

|
Classes | |
| struct | UARTcmd_t |
| The container type for motor commands. The control thread sends these to the various UART handlers through the UART queues. The container provides all the information needed to generate the appropriate motor action (reading from or writing to motor command registers) More... | |
| struct | IMUStruct |
| The data structure which represents the data of the IMU, which is sent in queues between tasks. More... | |
| struct | TXData_t |
| This is the data structure copied into the sensor queue, and read by the thread that sends data to the PC. It includes 2 fields: one that indicates the type of data it encapsulates, and the other pointing to the data. More... | |
Enumerations | |
| enum | eUARTcmd_t { cmdReadPosition, cmdWritePosition, cmdWriteTorque } |
| Enumerates the types of motor commands that can be sent to the UART handlers. More... | |
| enum | eTXData_t { eMotorData, eIMUData } |
| Enumerates the types of data that can be sent to the sensor queue. This is used so that the reader of the queue will know how to typecast the void pointer so that the data can be interpreted correctly. See TXData_t for more details. More... | |
Functions | |
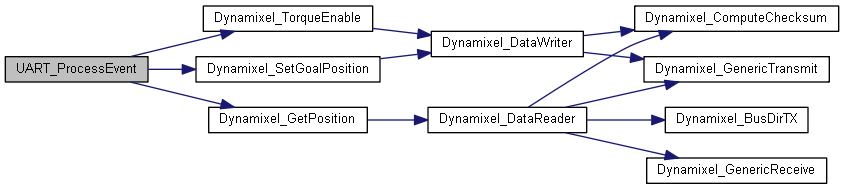
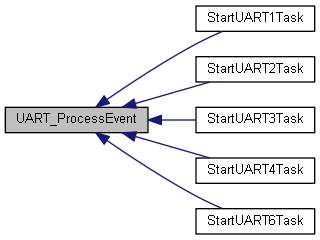
| void | UART_ProcessEvent (UARTcmd_t *cmdPtr, TXData_t *DataToSend) |
| The UART event processor calls the low-level libraries to execute reads and writes for motors. More... | |
Detailed Description
Header for UART event processor, showing the public content.
Enumeration Type Documentation
◆ eTXData_t
| enum eTXData_t |
Enumerates the types of data that can be sent to the sensor queue. This is used so that the reader of the queue will know how to typecast the void pointer so that the data can be interpreted correctly. See TXData_t for more details.
| Enumerator | |
|---|---|
| eMotorData | Indicates that the pointer is a Dynamixel_HandleTypeDef |
| eIMUData | Indicates that the pointer is a MPU6050_HandleTypeDef |
Definition at line 73 of file UART_Handler.h.
◆ eUARTcmd_t
| enum eUARTcmd_t |
Enumerates the types of motor commands that can be sent to the UART handlers.
| Enumerator | |
|---|---|
| cmdReadPosition | Command to read motor position |
| cmdWritePosition | Command to set new motor goal position |
| cmdWriteTorque | Command to refresh the motor torque enable |
Definition at line 43 of file UART_Handler.h.
Function Documentation
◆ UART_ProcessEvent()
The UART event processor calls the low-level libraries to execute reads and writes for motors.
- Parameters
-
cmdPtr the handle for the command structure containing all relevant data fields DataToSend the handle for the data structure to copy into the sensor queue if a read is executed
- Returns
- None
Definition at line 43 of file UART_Handler.c.