Event processor for motor commands. More...
Collaboration diagram for UART Handler:

|
Modules | |
| UART Handler (header) | |
| Header for UART event processor, showing the public content. | |
Functions | |
| void | UART_ProcessEvent (UARTcmd_t *cmdPtr, TXData_t *DataToSend) |
| The UART event processor calls the low-level libraries to execute reads and writes for motors. More... | |
Variables | |
| osMessageQId | TXQueueHandle |
Detailed Description
Event processor for motor commands.
Function Documentation
◆ UART_ProcessEvent()
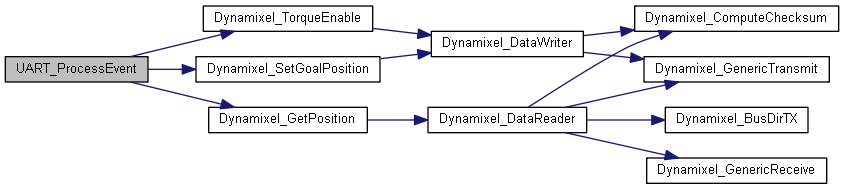
The UART event processor calls the low-level libraries to execute reads and writes for motors.
- Parameters
-
cmdPtr the handle for the command structure containing all relevant data fields DataToSend the handle for the data structure to copy into the sensor queue if a read is executed
- Returns
- None
Definition at line 43 of file UART_Handler.c.
Here is the call graph for this function:
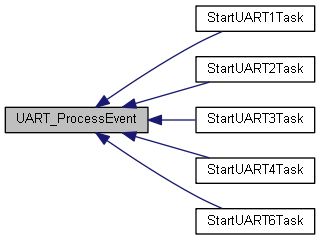
Here is the caller graph for this function:
Variable Documentation
◆ TXQueueHandle
| osMessageQId TXQueueHandle |
Sensor data queue. This module writes current positions of motors into this queue
Definition at line 129 of file freertos.cpp.
