Functions only accessible from within the IO library. More...

|
Functions | |
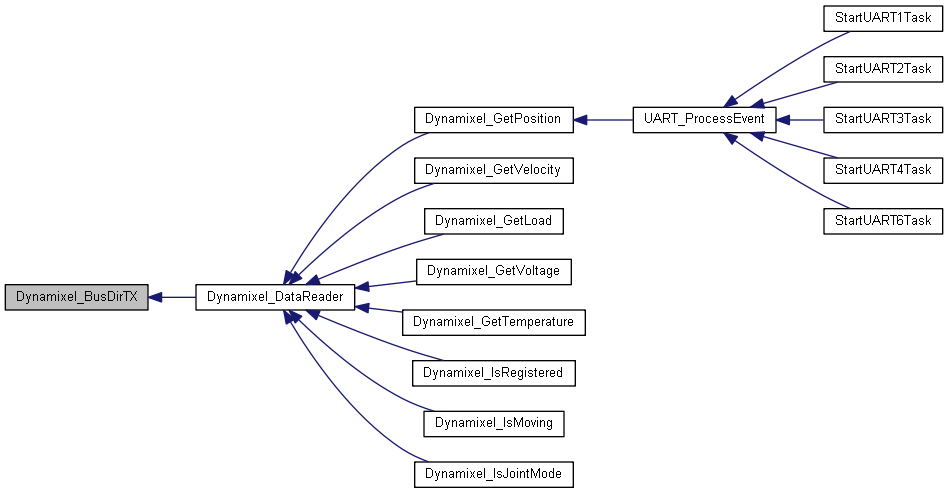
| static void | Dynamixel_BusDirTX (GPIO_TypeDef *port, uint16_t pinNum) |
| Set data direction pin high (TX) More... | |
| static void | Dynamixel_BusDirRX (GPIO_TypeDef *port, uint16_t pinNum) |
| Set data direction pin low (RX) More... | |
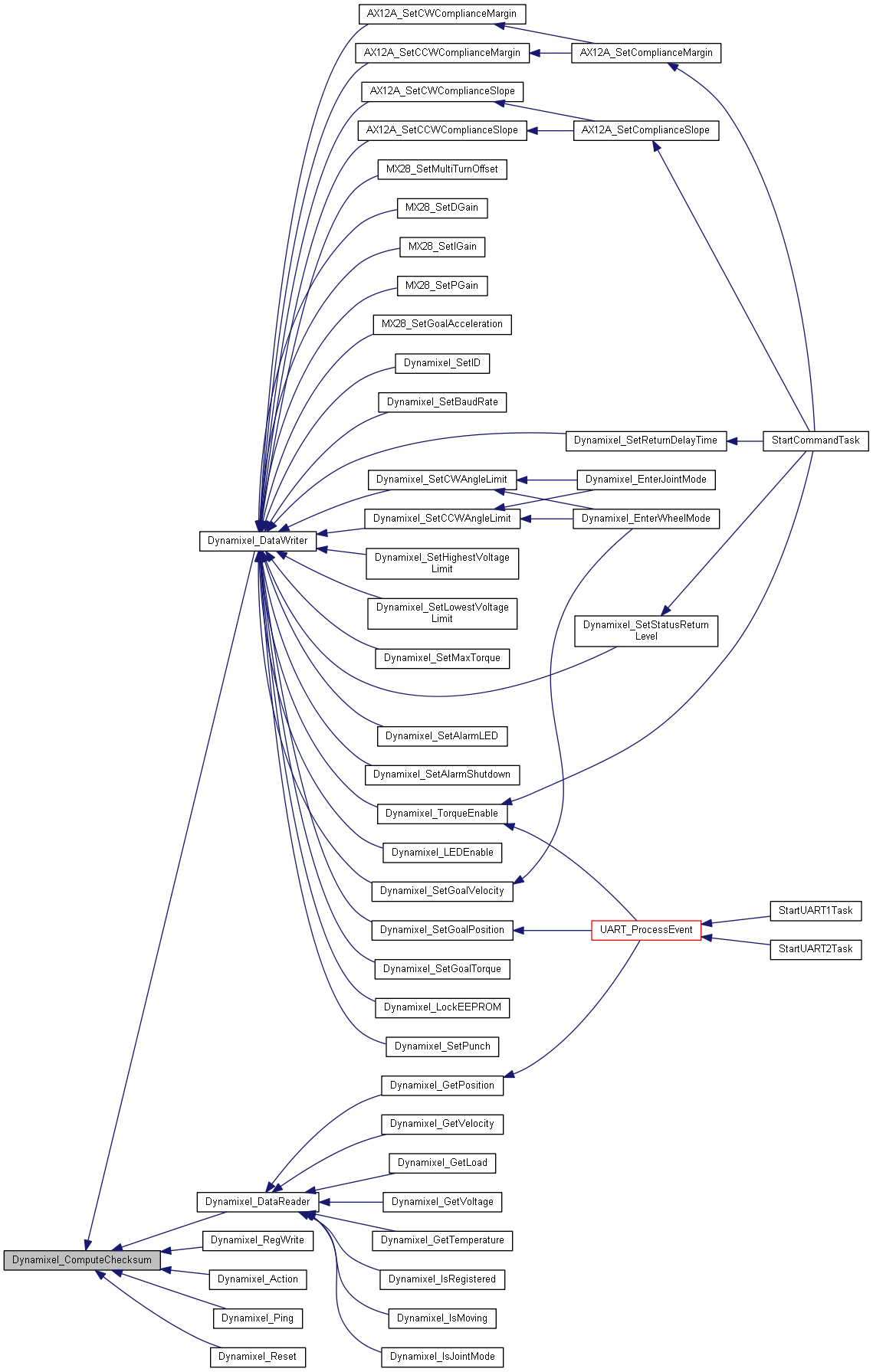
| static uint8_t | Dynamixel_ComputeChecksum (uint8_t *arr, int length) |
| Compute the checksum for data passes in, according to a modular checksum algorithm employed by the Dynamixel V1.0 protocol. More... | |
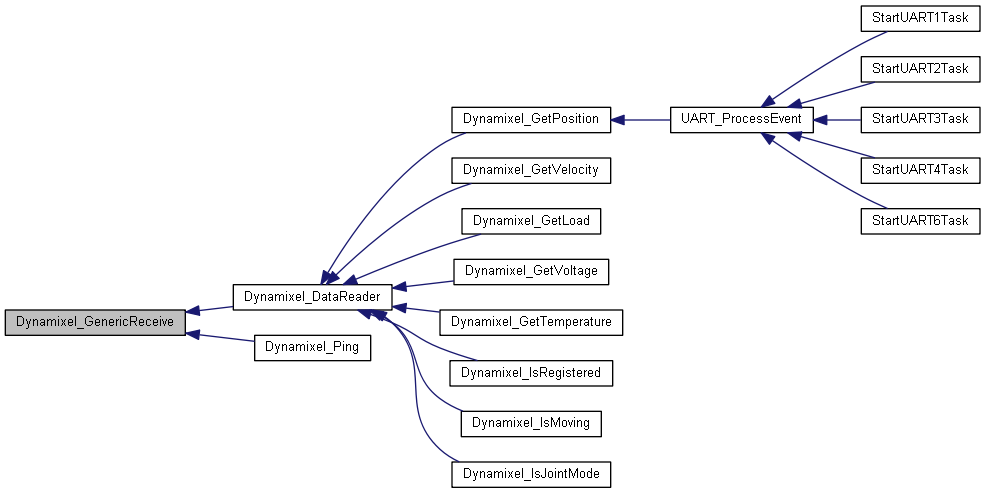
| static bool | Dynamixel_GenericReceive (Dynamixel_HandleTypeDef *hdynamixel, uint8_t *arr, uint8_t arrSize) |
| Generic function for receiving data. Supports all IO modes. More... | |
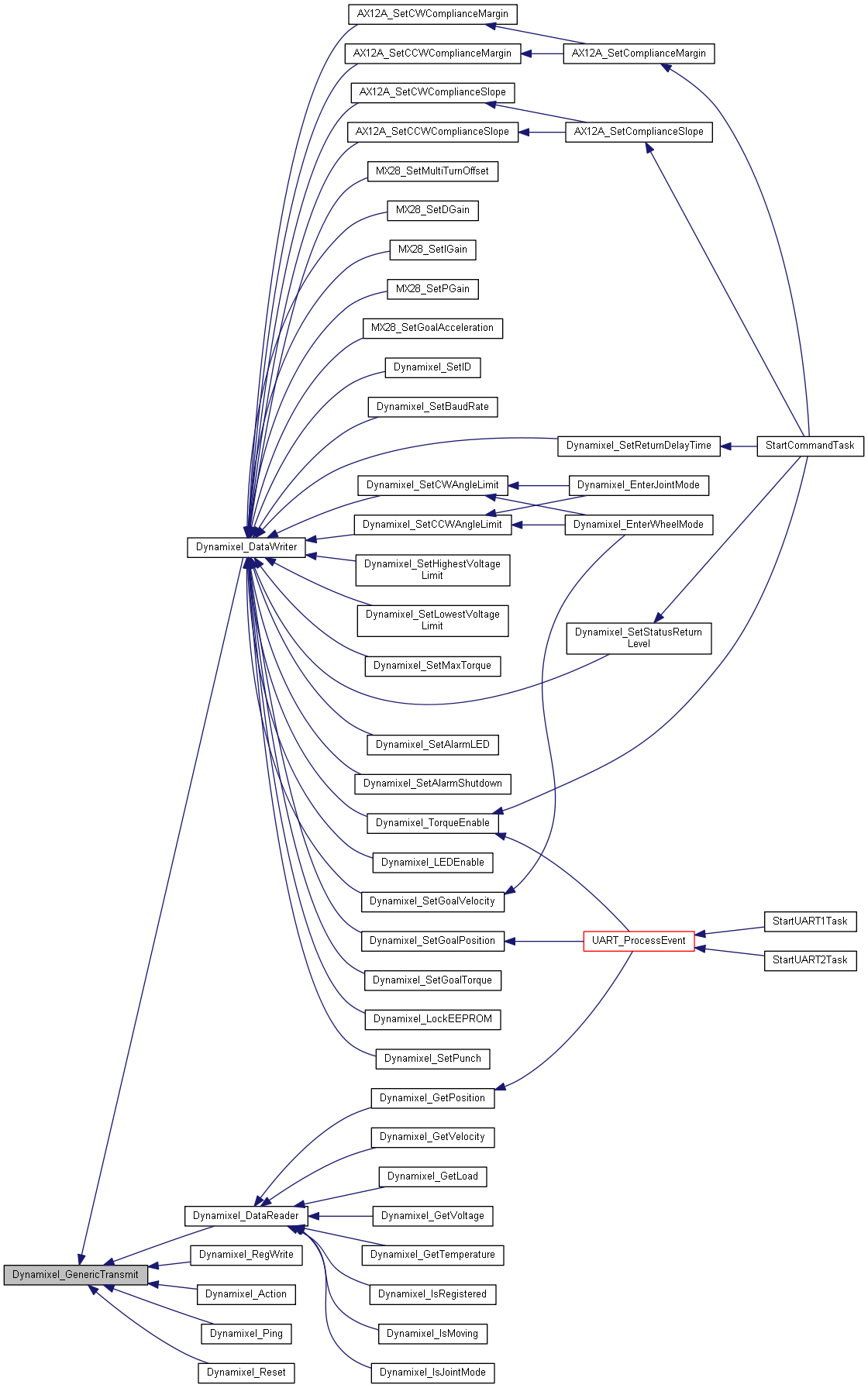
| static bool | Dynamixel_GenericTransmit (Dynamixel_HandleTypeDef *hdynamixel, uint8_t *arr, uint8_t arrSize) |
| Generic function for transmitting data. Supports all IO modes. More... | |
Detailed Description
Functions only accessible from within the IO library.
Function Documentation
◆ Dynamixel_BusDirRX()
|
inlinestatic |
Set data direction pin low (RX)
- Parameters
-
port the port the data direction pin is on pinNum the pin number of the data direction pin on the specified port
- Returns
- None
Definition at line 131 of file DynamixelProtocolV1_IO.c.
◆ Dynamixel_BusDirTX()
|
inlinestatic |
Set data direction pin high (TX)
- Parameters
-
port the port the data direction pin is on pinNum the pin number of the data direction pin on the specified port
- Returns
- None
Definition at line 121 of file DynamixelProtocolV1_IO.c.
◆ Dynamixel_ComputeChecksum()
|
inlinestatic |
Compute the checksum for data passes in, according to a modular checksum algorithm employed by the Dynamixel V1.0 protocol.
- Parameters
-
arr the array to be ran through the checksum function length the total length of the array arr
- Returns
- The 1-byte number that is the checksum
Definition at line 142 of file DynamixelProtocolV1_IO.c.
◆ Dynamixel_GenericReceive()
|
inlinestatic |
Generic function for receiving data. Supports all IO modes.
When using non-blocking IO, this function will cancel the data transfer upon timeout
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor arr pointer to the receive buffer arrSize the number of bytes to be received
- Returns
- true if no issues, false otherwise
Definition at line 254 of file DynamixelProtocolV1_IO.c.
◆ Dynamixel_GenericTransmit()
|
inlinestatic |
Generic function for transmitting data. Supports all IO modes.
When using non-blocking IO, this function will cancel the data transfer upon timeout
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor arr pointer to the packet to be transmitted arrSize the number of bytes to be transmitted
- Returns
- true if no issues, false otherwise
Definition at line 313 of file DynamixelProtocolV1_IO.c.