Register-setting functions. More...

|
Functions | |
| void | Dynamixel_SetID (Dynamixel_HandleTypeDef *hdynamixel, uint8_t ID) |
| Sets the ID (identification number) for the current motor. More... | |
| void | Dynamixel_SetBaudRate (Dynamixel_HandleTypeDef *hdynamixel, uint32_t baud) |
| Sets the baud rate of a particular motor. More... | |
| void | Dynamixel_SetReturnDelayTime (Dynamixel_HandleTypeDef *hdynamixel, uint16_t microSec) |
| Sets the time, in microseconds, that the motor should wait before returning a status packet. More... | |
| void | Dynamixel_SetCWAngleLimit (Dynamixel_HandleTypeDef *hdynamixel, float minAngle) |
| Sets the clockwise angle limit for the current motor. More... | |
| void | Dynamixel_SetCCWAngleLimit (Dynamixel_HandleTypeDef *hdynamixel, float maxAngle) |
| Sets the counter-clockwise angle limit for the current motor. More... | |
| void | Dynamixel_SetHighestVoltageLimit (Dynamixel_HandleTypeDef *hdynamixel, float highestVoltage) |
| Sets the highest operating voltage limit for the current motor. More... | |
| void | Dynamixel_SetLowestVoltageLimit (Dynamixel_HandleTypeDef *hdynamixel, float lowestVoltage) |
| Sets the lowest operating voltage limit for the current motor. More... | |
| void | Dynamixel_SetMaxTorque (Dynamixel_HandleTypeDef *hdynamixel, float maxTorque) |
| Sets the maximum torque limit for all motor operations. More... | |
| void | Dynamixel_SetStatusReturnLevel (Dynamixel_HandleTypeDef *hdynamixel, uint8_t status_data) |
| Sets the conditions under which a status packet will be returned. More... | |
| void | Dynamixel_SetAlarmLED (Dynamixel_HandleTypeDef *hdynamixel, uint8_t alarm_LED_data) |
| Sets the conditions under which the motor LED will light up. More... | |
| void | Dynamixel_SetAlarmShutdown (Dynamixel_HandleTypeDef *hdynamixel, uint8_t alarm_shutdown_data) |
| Sets the conditions under which the motor will turn off its torque. More... | |
| void | Dynamixel_TorqueEnable (Dynamixel_HandleTypeDef *hdynamixel, uint8_t isEnabled) |
| Enables or disables torque for current motor. More... | |
| void | Dynamixel_LEDEnable (Dynamixel_HandleTypeDef *hdynamixel, uint8_t isEnabled) |
| Toggles the motor LED. More... | |
| void | Dynamixel_SetGoalPosition (Dynamixel_HandleTypeDef *hdynamixel, float goalAngle) |
| Sets the goal position of the motor in RAM. More... | |
| void | Dynamixel_SetGoalVelocity (Dynamixel_HandleTypeDef *hdynamixel, float goalVelocity) |
| Sets the goal velocity of the motor in RAM. More... | |
| void | Dynamixel_SetGoalTorque (Dynamixel_HandleTypeDef *hdynamixel, float goalTorque) |
| Sets the torque limit for the motor in RAM. More... | |
| void | Dynamixel_LockEEPROM (Dynamixel_HandleTypeDef *hdynamixel) |
| Locks the EEPROM of the current motor until the next power cycle. More... | |
| void | Dynamixel_SetPunch (Dynamixel_HandleTypeDef *hdynamixel, float punch) |
| Sets a quantity proportional to the minimum current supplied to the motor during operation. More... | |
Detailed Description
Register-setting functions.
Setter functions
This subsection provides a set of functions which provide interfaces for setting motor register values.
Function Documentation
◆ Dynamixel_LEDEnable()
| void Dynamixel_LEDEnable | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint8_t | isEnabled | ||
| ) |
Toggles the motor LED.
Instruction register address: 0x19 (RAM)
Default value: 0x00
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor isEnabled - if 1, LED is on
- if 0, LED is off
- Returns
- None
Definition at line 551 of file DynamixelProtocolV1.c.

◆ Dynamixel_LockEEPROM()
| void Dynamixel_LockEEPROM | ( | Dynamixel_HandleTypeDef * | hdynamixel | ) |
Locks the EEPROM of the current motor until the next power cycle.
Instruction register address: 0x2F (RAM)
Default value: 0x00
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor
- Returns
- None
Definition at line 715 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetAlarmLED()
| void Dynamixel_SetAlarmLED | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint8_t | alarm_LED_data | ||
| ) |
Sets the conditions under which the motor LED will light up.
Register bits may be set simultaneously.
Register address: 0x11 (EEPROM)
Default value: 0x24 (0b00100100)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor alarm_LED_data the bits indicate the following: - bit 7: no function
- bit 6: flash LED when an instruction error occurs
- bit 5: flash LED when current load cannot be controlled with the specified maximum torque
- bit 4: flash LED when the checksum of the transmitted packet is invalid
- bit 3: flash LED when the command is given beyond the range of usage
- bit 2: flash LED when the internal temperature exceeds the operating range
- bit 1: flash LED when goal position exceeds the CW angle limit or CCW angle limit
- bit 0: flash LED when applied voltage is out of operating range
- Returns
- None
Definition at line 477 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetAlarmShutdown()
| void Dynamixel_SetAlarmShutdown | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint8_t | alarm_shutdown_data | ||
| ) |
Sets the conditions under which the motor will turn off its torque.
Register bits may be set simultaneously
Register address: 0x12 (EEPROM)
Default value: 0x24 (0b00100100)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor alarm_shutdown_data the bits indicate the following: - bit 7: no function
- bit 6: torque off when an instruction error occurs
- bit 5: torque off when current load cannot be controlled with the specified maximum torque
- bit 4: torque off when the checksum of the transmitted packet is invalid
- bit 3: torque off when the command is given beyond the range of usage
- bit 2: torque off when the internal temperature exceeds the operating range
- bit 1: torque off when goal position exceeds the CW angle limit or CCW angle limit
- bit 0: torque off when applied voltage is out of operating range
- Returns
- None
Definition at line 509 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetBaudRate()
| void Dynamixel_SetBaudRate | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint32_t | baud | ||
| ) |
Sets the baud rate of a particular motor.
Register address is 0x04 in motor EEPROM
Instruction register address: 0x04 (EEPROM)
Default value: 0x01
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor baud the baud rate. Arguments in range [7844, 1000000] are valid
- Returns
- None
Definition at line 169 of file DynamixelProtocolV1.c.

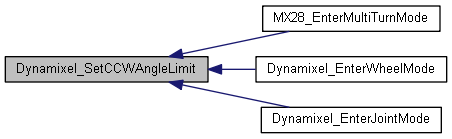
◆ Dynamixel_SetCCWAngleLimit()
| void Dynamixel_SetCCWAngleLimit | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | maxAngle | ||
| ) |
Sets the counter-clockwise angle limit for the current motor.
If maxAngle for CCW angle limit is 0 AND minAngle for CW angle limit is 0, then motor is in wheel mode where it can continuously rotate. Otherwise, motor is in joint mode where its motion is constrained between the set bounds.
Register 0x08 in EEPROM for low byte, 0x09 in EEPROM for high byte
Instruction register address: 0x08 (EEPROM)
Default value: 0x03FF
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor maxAngle the maximum angle for all motor operations. Arguments between 0 and 300 are valid
- Returns
- None
Definition at line 303 of file DynamixelProtocolV1.c.

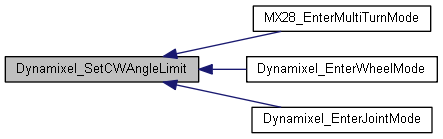
◆ Dynamixel_SetCWAngleLimit()
| void Dynamixel_SetCWAngleLimit | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | minAngle | ||
| ) |
Sets the clockwise angle limit for the current motor.
If maxAngle for CCW angle limit is 0 AND minAngle for CW angle limit is 0, then motor is in wheel mode where it can continuously rotate. Otherwise, motor is in joint mode where its motion is constrained between the set bounds.
Register 0x06 in EEPROM for low byte, 0x07 in EEPROM for high byte
Instruction register address: 0x06 (EEPROM)
Default value: 0x0000
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor minAngle the minimum angle for all motor operations. Arguments between 0 and 300 are valid
- Returns
- None
Definition at line 261 of file DynamixelProtocolV1.c.

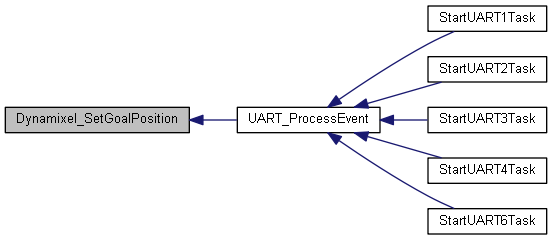
◆ Dynamixel_SetGoalPosition()
| void Dynamixel_SetGoalPosition | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | goalAngle | ||
| ) |
Sets the goal position of the motor in RAM.
Takes a double between 0 and 300, encodes this position in an upper and low hex byte pair (with a maximum of 1023 as defined in the AX-12 user manual), and sends this information (along with requisites) over UART. Low byte is 0x1E in motor RAM, high byte is 0x1F in motor RAM.
Instruction register address: 0x1E (RAM)
Default value: None
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor goalAngle the desired angular position. Arguments between 0 and 300 are valid. Note that 150 corresponds to the middle position
- Returns
- None
Definition at line 579 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetGoalTorque()
| void Dynamixel_SetGoalTorque | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | goalTorque | ||
| ) |
Sets the torque limit for the motor in RAM.
The initial value is taken from 0x0E and 0x0F (max torque in EEPROM)
Low byte is 0x22 in motor RAM, high byte is 0x23 in motor RAM.
Instruction register address: 0x22 (RAM)
Default value: ADDR14 (low byte) and ADDR15 (high byte)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor goalTorque the percentage of the maximum possible torque (max: 100). Gets converted into a 10-bit number
- Returns
- None
Definition at line 694 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetGoalVelocity()
| void Dynamixel_SetGoalVelocity | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | goalVelocity | ||
| ) |
Sets the goal velocity of the motor in RAM.
Low byte is 0x20 in motor RAM, high byte is 0x21 in motor RAM
Instruction register address: 0x20 (RAM)
Default value: None
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor goalVelocity the goal velocity in RPM. Arguments of 0-114 are valid when in joint mode. 0 corresponds to MAX motion in joint mode, and minimum motion in wheel mode. In wheel mode, negative arguments correspond to CW rotation
- Returns
- None
Definition at line 626 of file DynamixelProtocolV1.c.


◆ Dynamixel_SetHighestVoltageLimit()
| void Dynamixel_SetHighestVoltageLimit | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | highestVoltage | ||
| ) |
Sets the highest operating voltage limit for the current motor.
Instruction register address: 0x0C (EEPROM)
Default value: 140 (0xBE)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor highestVoltage the highest operating voltage in volts
- Returns
- None
Definition at line 345 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetID()
| void Dynamixel_SetID | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint8_t | ID | ||
| ) |
Sets the ID (identification number) for the current motor.
Note that the instruction will be broadcasted using the current ID. As such, if the ID is not known, the motor ID should be initialized to the broadcast ID (0xFE) in the Dynamixel_Init function
Instruction register address: 0x03 (EEPROM) Default value: 1
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor ID the number between 0 and 252 or equal to 254 to identify the motor. If 0xFE (254), any messages broadcasted to that ID will be broadcasted to all motors
- Returns
- None
Definition at line 143 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetLowestVoltageLimit()
| void Dynamixel_SetLowestVoltageLimit | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | lowestVoltage | ||
| ) |
Sets the lowest operating voltage limit for the current motor.
Instruction register address: 0x0D (EEPROM)
Default value: 60 (0x3C)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor lowestVoltage the lowest operating voltage in volts
- Returns
- None
Definition at line 377 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetMaxTorque()
| void Dynamixel_SetMaxTorque | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | maxTorque | ||
| ) |
Sets the maximum torque limit for all motor operations.
Low byte is addr 0x0E in motor RAM, high byte is addr 0x0F in motor RAM
Register address: 0x0E (EEPROM)
Default value: 0x3FF
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor maxTorque the maximum torque as a percentage (max: 100). Gets converted to 10-bit number
- Returns
- None
Definition at line 408 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetPunch()
| void Dynamixel_SetPunch | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| float | punch | ||
| ) |
Sets a quantity proportional to the minimum current supplied to the motor during operation.
Units are not specified in the datasheet, and therefore this function is not entirely useful without sufficient testing
Low byte at address 0x30 and high byte at address 0x31
Instruction register address: 0x30
Default value: 0x0020 (maximum: 0x3FF)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor punch for now, arguments in range [0, 1023] are valid
- Returns
- None
Definition at line 737 of file DynamixelProtocolV1.c.

◆ Dynamixel_SetReturnDelayTime()
| void Dynamixel_SetReturnDelayTime | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint16_t | microSec | ||
| ) |
Sets the time, in microseconds, that the motor should wait before returning a status packet.
Instruction register address: 0x05(EEPROM)
Default value: 250 (0xFA)
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor microSec the time in microseconds to delay. Arguments in range [2, 508] are valid. Default: 500
- Returns
- None
Definition at line 228 of file DynamixelProtocolV1.c.


◆ Dynamixel_SetStatusReturnLevel()
| void Dynamixel_SetStatusReturnLevel | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint8_t | status_data | ||
| ) |
Sets the conditions under which a status packet will be returned.
Register address: 0x10 (EEPROM)
Default value: 0x02
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor status_data - 0 to return only on ping
- 1 to return only for reads
- 2 to return for all commands
- Returns
- None
Definition at line 440 of file DynamixelProtocolV1.c.


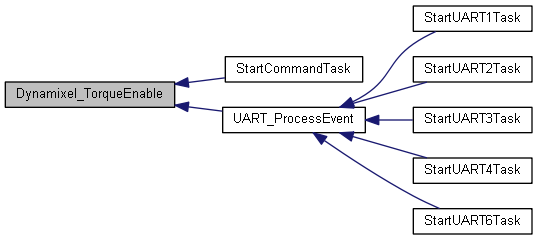
◆ Dynamixel_TorqueEnable()
| void Dynamixel_TorqueEnable | ( | Dynamixel_HandleTypeDef * | hdynamixel, |
| uint8_t | isEnabled | ||
| ) |
Enables or disables torque for current motor.
Instruction register address: 0x18 (RAM)
Default value: 0x00
- Parameters
-
hdynamixel pointer to a Dynamixel_HandleTypeDef structure that contains the configuration information for the motor isEnabled - if 1, then generates torque by impressing power to the motor
- if 0, then interrupts power to the motor to prevent it from generating torque
- Returns
- None
Definition at line 528 of file DynamixelProtocolV1.c.